
La orientación de la máquina: sensores y aferencias
Rubén Rodríguez Abril
La orientación constituye la forma más elemental de inteligencia. Cualquier organismo móvil debe saber dónde está y hacia dónde se dirige. En este artículo exploramos los sistemas sensoriales que dotan a las máquinas de esta conciencia espacial: sensores inerciales (IMU), visión artificial (cámaras, LiDAR) y referenciales globales (GNSS), que proporcionan información fundamental para alimentar técnicas de navegación avanzada como la odometría y el SLAM.
Introducción
El neurofisiólogo colombiano Rodolfo Llinás postuló en su trabajo I of the Vortex, from Neurons to Self la tesis de que la mente y los sistemas nerviosos de los seres vivos están intrínsecamente ligados a la necesidad del organismo de navegar y de interactuar de forma efectiva con su entorno. Un organismo sésil, anclado en un determinado lugar, no requeriría de un cerebro complejo. Por el contrario, un organismo que se mueve necesita realizar continuamente representaciones internas del mundo físico que le rodea para anticipar las consecuencias de su movimiento.
Trasladando estas ideas al ámbito de la ingeniería, el desarrollo completo de la inteligencia artificial, particularmente de la inteligencia agéntica, exige de la creación de mecanismos que doten a los autómatas de capacidades análogas. Para que un agente pueda interactuar con su entorno, requiere de una propiocepción artificial, esto es, una comprensión precisa y en tiempo real de dónde está, cómo se orienta y qué le rodea. Y en base a ello, interactuar inteligentemente con el entorno y tomar decisiones coherentes sobre su desplazamiento.
Este artículo se centra precisamente en uno de los pilares de esta propiocepción maquínica: la percepción de la posición y orientación de una máquina en el espacio, a través de sistemas multimodales de Deep Learning.
Pose
La información relativa a la posición y la orientación completa de un objeto se denomina pose: abarca no sólo información relativa a dónde está (coordenadas de posición), sino también hacia dónde está apuntando (coordenadas angulares). En esencia, la pose responde a la pregunta: “¿dónde estoy y a qué dirección estoy mirando?”.
Las coordenadas angulares, que determinan la orientación de un cuerpo rígido en el espacio, son tres y reciben el nombre de ángulos de Euler. En aeronáutica adoptan los nombres siguientes:
a) Rumbo (guiñada/yaw). Mide la orientación en el plano horizontal (puntos cardinales). Calibrada por la brújula.
b) Morro (cabeceo/pitch) Es la inclinación del eje longitudinal del avión (de cabeza a cola). Usado para ascender o descender en aeronaves.
c) Ala (alabeo/roll). Indica la inclinación lateral de la aeronave. Responsable del balanceo de los pasajeros hacia uno u otro lado.
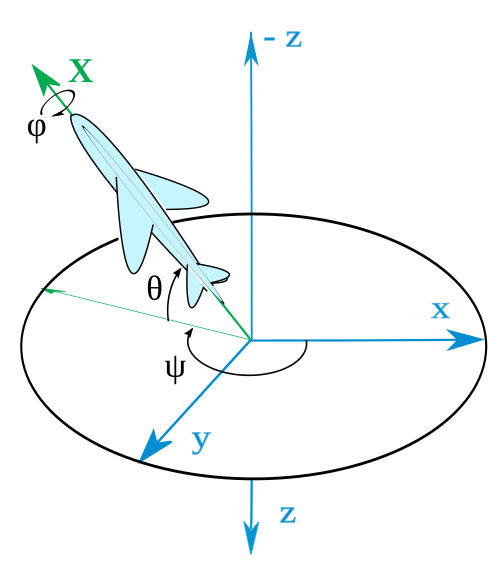
Figura 1. Ángulos de Euler en una aeronave, que representan sus tres posibles rotaciones en el espacio: rumbo (ψ), morro (θ) y ala (ϕ). Fuente: Wikipedia.
La pose es estimada a través dos estrategias especiales:
–SLAM (localización y mapeo simultáneos, Simultaneous Location and Mapping): La máquina construye un mapa del entorno desconocido y determina cuál es su propia posición dentro de ese mapa, en tiempo real.
–Odometría (del griego ὁδός, camino): El autómata realiza una estimación progresiva del camino recorrido a lo largo del tiempo, partiendo de sus propios sensores internos.
Sensores
Los sensores utilizados para estimar la pose son de naturaleza heterogénea. Entre ellos podemos citar los sistemas de navegación por satélite (GNSS), las unidades inerciales (IMU), los barómetros, las cámaras, sistemas de láser (LiDAR) o incluso los rádares de microondas.
Todos ellos pueden clasificarse en tres grandes grupos:
–Sentidos inerciales internos, que miden cómo la máquina percibe su propio movimiento (giróscopos, acelerómetros, brújulas).
–Visión artificial, que captura información de naturaleza óptica del exterior (cámaras para la luz visible, láseres, rádares).
–Sentidos referenciales globales, que proporcionan coordenadas absolutas en el marco planetario (sensores de navegación por satélite, brújulas, barómetros).
Sentidos inerciales internos (IMU)
Los sentidos inerciales determinan la orientación espacial y la percepción del movimiento. Cumplen en la máquina una función parecida a la del sistema vestibular humano, situado en el oído interno, que es fundamental para mantener el equilibrio, percibir la aceleración lineal y angular, y determinar la orientación de la cabeza en relación con la gravedad.
En los autómatas estas funciones son llevadas a cabo por un componente electrónico especializado denominado unidad de medición inercial o IMU (Inertial Measurement Unit). Ésta se compone de tres elementos fundamentales:
–Tres acelerómetros, que miden la aceleración lineal del cuerpo.
–Tres giroscopios, que miden su velocidad angular (es decir, la tasa de cambio temporal de los ángulos de Euler).
–Un magnetómetro (brújula), que es opcional, y que se utiliza para medir el rumbo a partir del campo magnético terrestre.

Figura 2. Unidad de medición inercial del programa Apollo. Fuente: Wikipedia.
Los sensores no miden la posición y orientación absolutas de la máquina, sino la tasa de cambio de los mismos. Particularmente, los acelerómetros entregan una segunda derivada temporal (aceleración), mientras que los giróscopos ofrecen una primera derivada (velocidad angular).
Para obtener la pose, estas mediciones tienen que ser integradas a lo largo del tiempo, generalmente utilizando un algoritmo estadístico denominado filtro de Kalman. Los errores acumulados en el cálculo de posición y orientación se denominan deriva, y deben ser corregidas por medio de otros sensores o a través de algoritmos específicos.
Visión artificial
Además de sus sentidos inerciales, el autómata puede recibir información óptica del entorno, que le permite realizar una representación interna del espacio exterior. Las estrategias pueden ser de dos tipos:
–Percepción pasiva. El sistema captura radiación electromagnética (luz visible, infrarrojo, láser…) del entorno, mediante cámara, sin alterar la escena. La información recibida es procesada por algoritmos de deep learning y visión por ordenador, que permiten realizar tareas como la detección de objetos, la estimación de profundidad o la odometría visual (que analizaremos en el artículo siguiente).
–Percepción activa (sondeo visual). El autómata emite su propia radiación electromagnética y analiza la señal reflejada (“eco”), con el objeto de medir distancias. A partir del tiempo de retorno o del desplazamiento de fase, se confecciona un mapa del exterior. En esta familia se incluyen:
a) LiDAR. Emite pulsos de luz láser y mide el tiempo que tarda en regresar cada uno. Es el equivalente a «palpar» el entorno con luz. La emisión puede consistir en un barrido, que genera una nube de puntos 3D de alta precisión, o en un flash láser, que luego es capturada por una cámara, cuyas celdas miden el tiempo de vuelo de cada pixel.
b) Radar. Utiliza ondas de radio o microondas, siendo más robusto ante condiciones adversas (lluvia, niebla, polvo) y capaz de medir directamente la velocidad de los objetos mediante el efecto Doppler.
c) Sonar. Aunque no es óptico, sigue el mismo principio, usando pulsos de sonido para navegar en entornos subacuáticos.
Sentidos referenciales globales
Los sentidos referenciales globales determinan la posición de la máquina a escala planetaria. A diferencia de los sensores inerciales o visuales —que describen el movimiento relativo o el entorno inmediato—, estos sentidos conectan al autómata con el sistema de coordenadas global.
Entre ellos se encuentran:
–Sistemas de navegación por satélite (GNSSs, Globa Navigation Satellite Systems). La máquina calcula su posición mediante trilateración, midiendo la distancia a la que se encuentran varios satélites (al menos cuatro), cuyas órbitas y tiempo son conocidos. En base a dichas distancias, calcula su posición (longitud, latitud, altura) sobre la superficie terrestre y además la desviación temporal de su propio reloj sobre el tiempo UTC.
Cada satélite emite continuamente una señal que incluye:
-Sus propias coordenadas orbitales keplerianas (efemérides).
-Las coordenadas aproximadas del resto de los satélites de su constelación (almanaque).
-Una marca de tiempo de su reloj atómico.
El receptor terrestre compara ese tiempo con su propio reloj de cuarzo para estimar la distancia a cada satélite (pseudodistancia). La combinación de las efemérides y las pseudodistancias de al menos cuatro satélites permite resolver el sistema de ecuaciones que define su posición en el espacio y el desfase temporal, causada a menudo por el hecho de que el reloj del receptor no es atómico, sino de cuarzo.
Las cuatro grandes constelaciones de satélites existentes en la actualidad son GPS (EEUU), Galileo (Unión Europea), GLONASS (Rusia) y BeiDou (China).
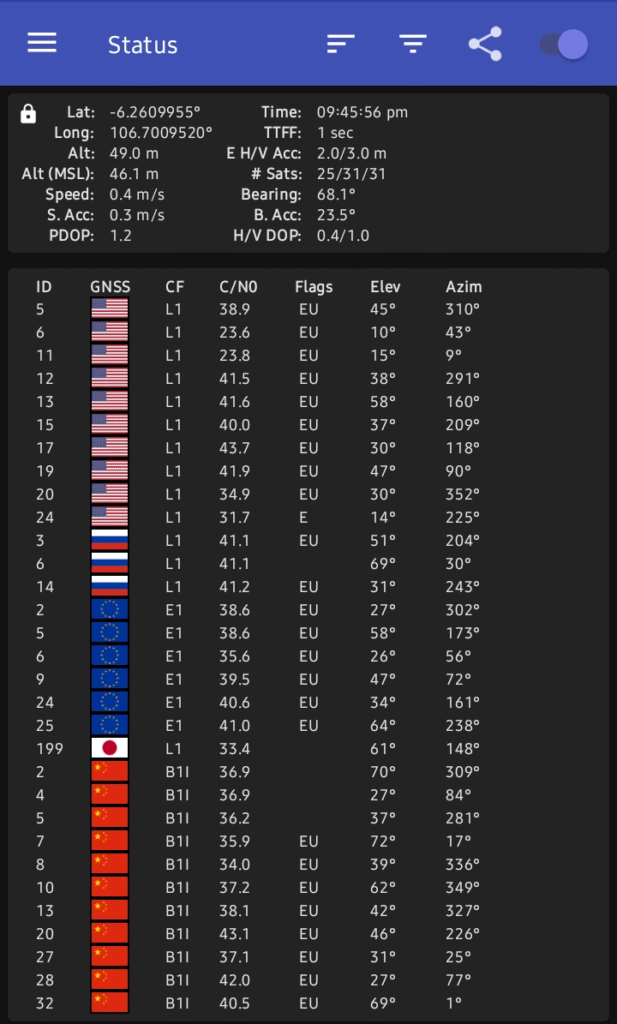
Figura 2. La tabla recoge datos orbitales (azimut, elevación) y calidad de señal (C/N₀) de satélites de distintas constelaciones. Fuente: Wikipedia.
–Técnicas de Alta Precisión (RTK y PPK). Corrigen las estimaciones de los sistemas GNSS, que a menudo presentan errores causados por ruido atmosférico, multitrayecto o incluso efectos relativistas (dilación del tiempo por la presencia de una mayor densidad de materia-energía). RTK (Real Time Kinematic) lo hace en tiempo real, mientras que PPK (Post-Processed Kinematic) aplica las correcciones posteriormente, durante el procesado de los datos. Ambas permiten alcanzar precisiones centimétricas, siendo esenciales en geodesia, agricultura de precisión y navegación autónoma.
–Barómetro. Estima la altitud relativa midiendo la presión atmosférica, que decrece con la altura. Es un sensor rápido y de bajo consumo, pero su lectura se ve afectada por cambios meteorológicos.
–Magnetómetro. Mide la dirección del campo magnético terrestre y proporciona una referencia de rumbo absoluto. Sus medidas deben corregirse a consecuencia de la declinación magnética local y protegerse de interferencias ferromagnéticas.
Fusión sensorial
La información procedente de todos estos sentidos -inerciales, visuales y globales- debe converger en un mismo marco de referencia para que la máquina cree una representación coherente y estable de su propia posición en el espacio.
En el próximo artículo analizaremos dos técnicas en particular: la odometría, que calcula la trayectoria del autómata a partir de sus mediciones internas, y el SLAM (Simultaneous Localization and Mapping), una técnica más avanzada que permite al robot construir un mapa del entorno desconocido y usarlo para localizarse con precisión. La clave de su robustez reside en los cierres de bucles, los momentos en que la máquina detecta un lugar ya visitado con anterioridad y corrige retroactivamente todo el error acumulado durante la trayectoria. Es en ese instante -cuando el autómata recuerda el pasado para reescribir su presente- donde la orientación deja de ser mera medida y se aproxima a una forma elemental de memoria.







